

Robots
-
General Item
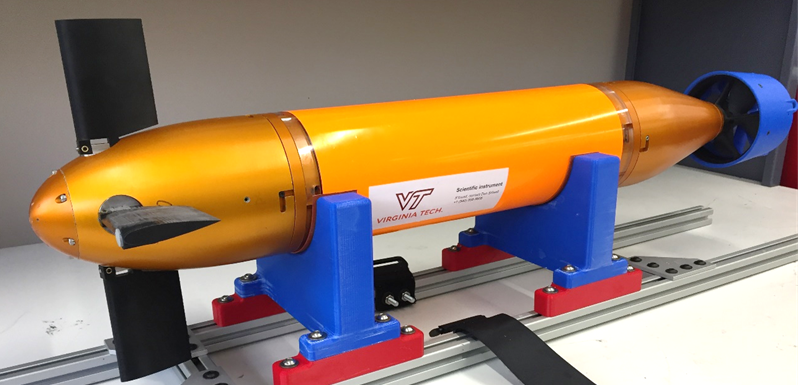
 690 Autonomous Underwater Vehicle
690 Autonomous Underwater VehicleThe Virginia Tech 690 AUV is designed for bathymetric surveys. It has a side-scan sonar and a high-end navigation system.
-
General Item
 Dragon AUV
Dragon AUVThe Dragon AUV is designed to tow very large payloads
-
General Item
 Virginia Tech Glider
Virginia Tech GliderThe Virginia Tech Underwater Glider, designed, fabricated and field tested by Artur Wolek while working as a doctoral student under the guidance of Craig Woolsey.
-
General Item
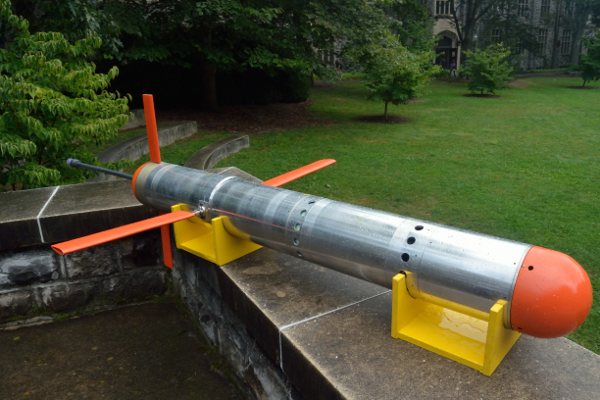
 High Speed Autonomous Underwater Vehicle
High Speed Autonomous Underwater VehicleThe Virginia Tech High-Speed AUV is 3 inches in diameter and capable of speeds in excess of 15 knots. It was designed to operate heavy -- weight 50% greater than displacement. When not cruising at high speed, it can hover nose-down.
-
General Item
 Javelin Autonomous Underwater Vehicle
Javelin Autonomous Underwater VehicleThe Javelin AUV is designed to compete in the Shell Ocean XPRIZE competition and is part of the Virginia DEEP-X system.
-
General Item
 Self-Mooring Autonomous Underwater Vehicle
Self-Mooring Autonomous Underwater VehicleThe Self-Mooring AUV is can moor itself on the ocean floor.
-
General Item
 Virginia Tech Unmanned Surface Vehicle
Virginia Tech Unmanned Surface VehicleThe Virginia Tech unmanned surface vehicle is a fully autonomous 16' rigid hull inflatable boat.